1. Tehnilised omadusedeVTOL-mootor
In hajutatud elektrilinePropulsioonina panevad mootorid käima mitut propellerit või ventilaatorit tiibadel või kerel, moodustades propulsioonisüsteemi, mis annab õhusõidukile tõukejõu. Mootori võimsustihedus mõjutab otseselt õhusõiduki kandevõimet. Mootori väljundvõimsus, töökindlus ja keskkonnasõbralikkus on olulised tegurid, mis määravad elektrilise õhusõiduki dünaamilised omadused ja ohutuse. Elektrisõidukite, droonide ja eVTOL-mootorite valik on erinev erinevate kulude, rakendusstsenaariumide ja muude põhjuste tõttu [1].

(Foto allikas: Network/Safrani ametlik veebisait)
1) Elektrisõidukid: rohkem püsimagnetitsünkroonmootorid,Suurema efektiivsuse ja pöördemomendiga püsimagnetmootorid pakuvad paremat sõidukogemust. Samal ajal aitab püsimagnetmootorite suur võimsustihedus ka elektriautodel sama mahu juures suuremat võimsust saavutada.
(2) UAV: tavaliselt kasutatakse harjadetaAlalisvoolumootor.Harjadeta alalisvoolumootoril on väike kaal ja müra ning madalad hoolduskulud, mis sobib droonide lennuvajaduste rahuldamiseks; teiseks on harjadeta alalisvoolumootori kiirus suurem, mis sobib droonide kiirete lennuvajaduste rahuldamiseks. Näiteks DJI kasutab harjadeta mootoreid.
(3) eVTOL: Kõrgemate mootori efektiivsuse ja pöördemomendi tiheduse nõuete tõttu on püsimagnetiga sünkroonmootor väga paljutõotav lahendus elektrilise propulsioonijõusüsteemi jaoks, kuna aksiaalvoo püsimagnetiga mootoril on radiaalruumi kõrge kasutusmäär ning võimsustihedusel ja pöördemomendi tihedusel on eelised väikese pikkuse ja läbimõõdu suhte korral. Praegused elektrilised VTOL-õhusõidukid, näiteks Joby S4 ja Archer Midnight, kasutavad kõik püsimagnetiga sünkroonmootoreid [1].
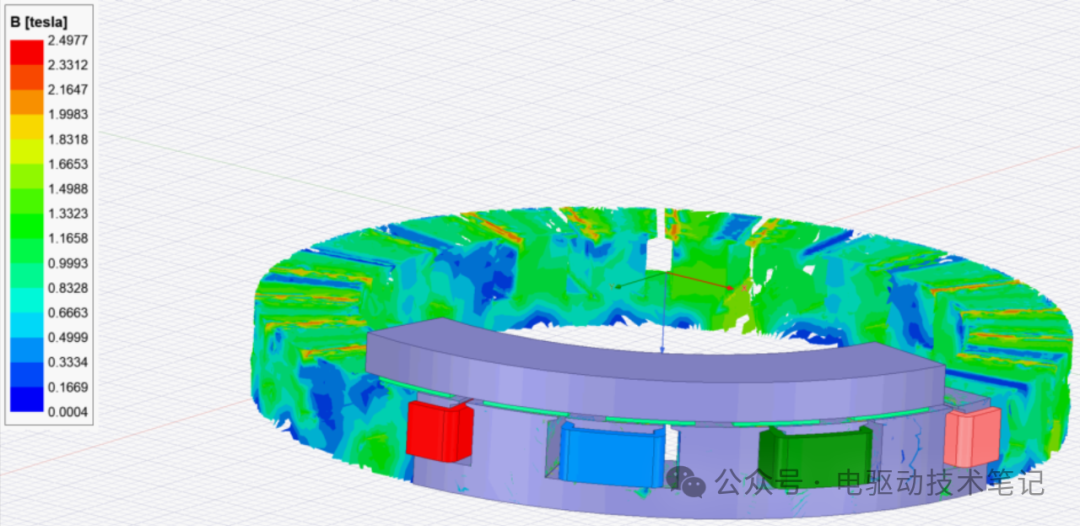
Järgmisel joonisel on kujutatud ühe staatoriga ühe rootoriga aksiaalvoomootori fikseeritud rootori magnetilise induktsiooni intensiivsuse pilvekujutis.
Järgnev joonis on elektrilise õhusõiduki ja elektriauto mootorite parameetrite võrdlus.

2.eVTOL-i motoorse arengu trend
Praegu on eVTOL-toitesüsteemi peamine arengusuund mootori konstruktsiooni ja jahutussüsteemi abikaalu vähendamine elektromagnetilise disainitehnoloogia, soojushalduse tehnoloogia ja kergekaalu tehnoloogia täiustamise abil ning mootori võimsustiheduse ja väljundvõimsuse pidev parandamine laias muutuvate tingimuste vahemikus. Lennukimootorite jõuallikad on suutnud saavutada mootori korpuse nimivõimsustiheduse üle 5 kW/kg, kasutades kõrgema temperatuuripiiranguga isolatsioonimaterjale, suurema magnetilise energiatihedusega püsimagnetmaterjale ja kergemaid konstruktsioonimaterjale. Mootori elektromagnetilise konstruktsiooni täiustamise, näiteks Halbachi magnetmassiivi, rauast südamikuta konstruktsiooni, Litzi traadi mähise ja muude tehnoloogiate kasutamise, samuti mootori soojuseralduse konstruktsiooni täiustamise abil eeldatakse, et mootori korpuse nimivõimsustihedus võib 2030. aastaks ulatuda 10 kW/kg-ni ja 2035. aastaks ületada 13 kW/kg [1].

3. Täiselektriliste ja hübriidsete marsruutide võrdlus
Võrreldes täiselektrilise ja hübriidliiniga, põhineb kodumaine eVTOL-projekt praeguste asjakohaste tootjate valikust peamiselt täiselektrilisel skeemil, mida piirab liitiumioonakude energiatihedus ja väike reisijateveovõimsus on eVTOL-i parim maandumiskoht täiselektrilise jõuseadme tehnoloogiale. Välismaal on mõned tootjad hübriidplaani eelnevalt välja töötanud ning võtnud juhtrolli mitmetes testimis- ja iteratsioonivoorudes. Nagu järgmisest tabelist näha, on hübriidskeem vastupidavusnurga osas ilmselgelt tugevam ja tulevikus saab seda kasutada rohkem kesk- ja pikamaa- ning madala kõrgusega liikluses [1].
Postituse aeg: 27. veebruar 2025